Space Concordia’s Robotics Division was formed as an engineering final project in 2012. The team is divided into four engineering teams (Mechanical, Electrical, Software, Science) and the project is divided into five systems (Mobile Platform, Robotic Manipulator, Science Payload, Autonomy, Operations). Over the years, the Robotics Division has focused on different parts of the rover, from the multipurpose arm, to the mobile platform, to onboard science experiments, finally culminating in the current design.
Our Mission
The Robotics Division's mission consists of three aspects: project-based learning, professional excellence, and community outreach.
Our team is dedicated to developing competitive projects within the domain of aerospace robotics. These projects allow our members to learn outside of the classroom and put their already existing knowledge to practice. It is also a place to establish connections within the industry: many alumni end up in positions within organizations such as the CSA, MDA and silicon valley. Finally, completed projects are frequently showcased in outreach events. This is done with the intent of promoting STEM within the outer community.
Current Project
Space Concordia Robotics Division is currently developing a Mars rover that would act as an astronaut assistant for Mars exploration missions. The rover is designed as a mobile platform capable of housing three modules: a robotic manipulator, a scientific analysis module and an autonomous driving unit.
Past Projects
The team competed with their rover ASTRO in the University Rover Challenge (URC 2019) at the Mars Desert Research Station in Utah this past summer, as well as the European Rover Challenge (ERC 2019) in Kielce, Poland where they won 10th place out of 29 participating teams.
Future Projects
In 2020, the team plans to improve on the existing rover design in the coming years, with the goal of participating in both URC and ERC, as well as the Canadian International Rover Challenge (CIRC) in Alberta.
In addition to competitions, the team plans to eventually have a research-oriented rover. This rover would serve as a platform with a standardized interface, permitting collaboration with research groups and organizations who wish to test new technologies or perform experiments.
Upon closure of the current project iterations and upon acquisition of sufficient resources, the team may also be interested in expanding and offering other robotics-related projects to the student base. For suggestions and proposals, please contact us at robotics@spaceconcordia.ca.
Team Structure
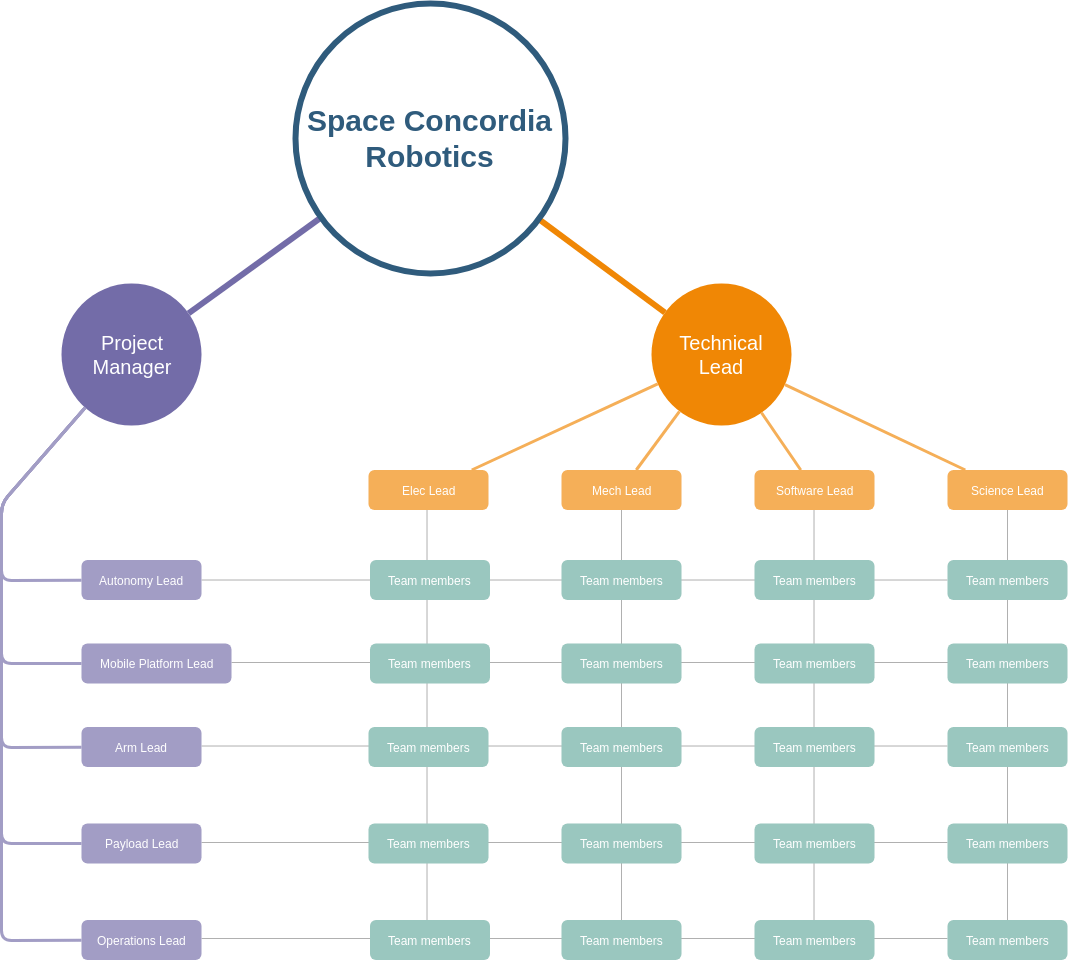
The team is currently led by a project manager and a technical lead.
The project manager is in charge of managing human resources, finances, and timelines. They maintain communications with the five systems leads presented in the image below, guaranteeing that the mobile platform, robotic manipulator, science payload, autonomy system and operations team have enough resources and are completing the work on time.
The technical lead is in charge of setting technical requirements, determining the overall design of the rover, and ensuring that the different modules interface correctly. They maintain communications with the four engineering leads presented in the image below, guaranteeing that the mechanical, electrical, software and science requirements do not clash with each other.
_
Project manager: philippe.carvajal@spaceconcordia.ca
HR/marketing: miranda.popovich@spaceconcordia.ca
Technical lead: josh.glazer@spaceconcordia.ca
SYSTEM LEADS
Mobile platform team: daniel.berry@spaceconcordia.ca
Autonomy team: koa.wells@spaceconcordia.ca
ENGINEERING LEADS
Mechanical team: maxim.kaller@spaceconcordia.ca
Electrical team: jeffrey.hamel@spaceconcordia.ca
Software team: peter.granitski@spaceconcordia.ca and cedric.martens@spaceconcordia.ca
Science team: stephen.haneyhernandez@spaceconcordia.ca
_
Space Concordia Robotics Division is incredibly grateful to all of our sponsors. We welcome sponsorship in funding as well as in kind, both of which are key to our success.
If you are interested in becoming a sponsor, please contact us at robotics@spaceconcordia.ca and we would be more than happy to discuss our sponsorship package with you.
![]()
![]()


![]()



_